Software Architecture of SIREN!
The stuffs we are work with.

"Moving beyond standard middleware constraints, our software stack utilizes a custom, lightweight Python architecture that bypasses the latency overhead typically associated with ROS. Leveraging the NVIDIA Jetson AGX Orin’s multi-core capabilities, we implement a deterministic multiprocessing framework where sensor drivers and control loops execute asynchronously. For precise vehicle dynamics, the system utilizes a tuned P-Control algorithm fused with a 1-Dimensional Kalman Filter. This combination stabilizes magnetic heading data against high-frequency noise, translating high-level path planning into smooth, jitter-free thruster actuation via the MAVLink protocol."
How it works ?
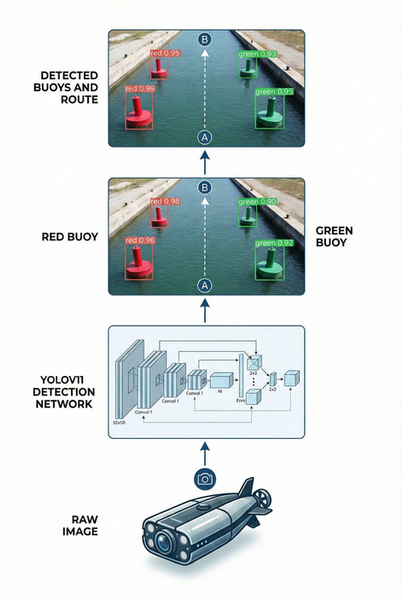
"Our perception engine is anchored by a YOLOv11 model optimized via TensorRT for FP16 half-precision inference, achieving a 5x speedup in object detection latency compared to standard execution. This deep learning layer operates in tandem with a 'Lidar-First' mapping strategy using the RPLIDAR S3, which prioritizes geometric obstacle data for robust collision avoidance. Visual depth data from the ZED 2i stereo camera supplements this model by filling blind spots, creating a comprehensive 3D spatial representation. This sensor fusion pipeline allows the Siren to dynamically generate collision-free trajectories using lightweight A* algorithms, ensuring adaptive autonomy in complex maritime environments."